电站综合自动化实验中心简介
组成:
本实验中心隶属于自动化工程学院,由热工计量实验室、电力传感网实验室、电站仿真与DCS控制实验室、菲尼克斯现场总线实验室、电站自动化实验室和智能自主系统实验室共6个实验室组成,中心组成结构如下图所示:
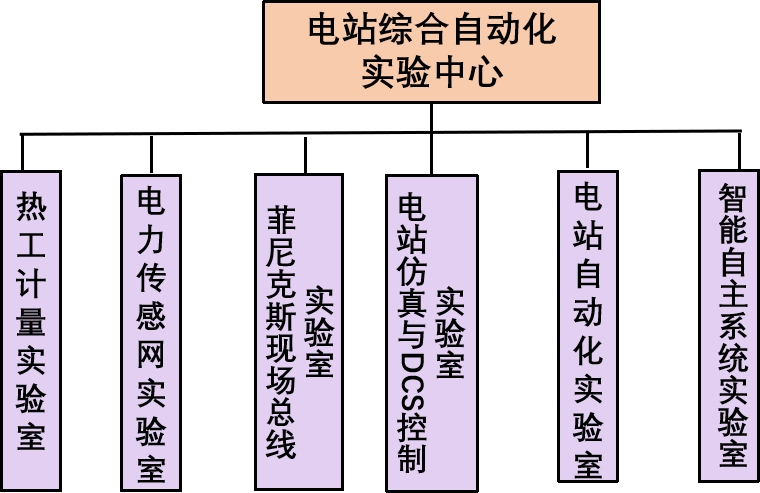
图1 电站综合自动化实验中心组成结构图
本实验中心面向智能发电自动化领域,与艾默生、福克斯波罗、施耐德、罗克韦尔、上海自仪等知名企业产学研共建相关实验平台,拥有当前火电、核电最主流的基于虚拟DCS的300MW循环流化床、600MW超临界和1000MW超超临界机组激励式全范围电站仿真系统,火电半实物仿真与优化控制系统,分散控制系统DCS,现场总线FCS,电厂厂级监控信息系统SIS,电厂辅控网络化监控系统,发电机组振动数据采集与诊断分析系统,风力发电控制与远程监控系统,智能无线传感网络监测系统等。在这些平台上除了可以完成电厂集控运行人员的操作培训及热控人员进行机组DCS控制系统的设计、组态和调试外,还可进行机组控制系统参数优化、先进控制技术、设备故障诊断、控制系统安全防护、机组运行大数据挖掘分析与优化运行等研究工作,有效保障了教学、培训和科学研究的顺利进行。
本实验中心开设的本科实验实践类课程包括:发电特色类课程实验(如电站控制系统、DCS、BMS & CCS、DEH等)、本科生认识实习、课程设计、毕业仿真实习和毕业设计等,实验项目以综合训练为主,培养学生综合设计思想及独立思考意识。
部分实验室介绍
1、热工计量实验室
热工计量实验室面向自动化和测控技术与仪器专业本科生,能够满足温度检定、压力检定、流量检定、电信号检定、转速检定、位移检定等六大类计量实践项目的开展。该实验室与华东电科院、上海市计量协会进行了产学研紧密合作,并与上海市计量协会签订了培养学生热工计量能力考证的框架合作协议,已建设成为学生热工计量能力培训和考证的基地。通过计量基础理论、计量专业知识的学习和实践操作,学生的职业素养可以得到充分的培养。基础理论、专业知识、实操均合格的学生可以获得“计量专业岗位人员能力资格证书”,毕业后可在企业内部持证上岗。



图2热工计量实验室
2、电站仿真与DCS控制实验室
电站仿真与DCS控制实验室面向自动化、测控技术与仪器、核电技术与控制、智能科学与技术等专业的本科生,主要用于电站集控运行,对象建模、优化控制等相关课程教学实践、综合课程设计、认知实习、电站工程师实训,以及面向电厂运行、热工人员的培训。
实验室仿真平台包含了300MW、600WM、1000MW等国内典型燃煤火电机组仿真系统,可完全仿真从冷态到满负荷发电的各个阶段工况,可满足机组启动、停运、事故操作等各项实操培训需要。平台采用激励式仿真技术,可实现真实DCS与机组仿真模型的直接对接,提供了对电站对象的优化控制仿真实验和测试的手段。实验室配备了热电阻、热电偶、流量计等常规变送器和多种带有FF、Wireless HART现场总线功能的智能变送器,以及阀门等执行机构。在教学实践、认知实习等课程中,通过这些实际设备的展示,使学生了解对电站对象测量和控制的手段,促进理论知识的掌握。


图3电站仿真与DCS控制实验室
智能自主系统实验室
上海电力大学智能自主系统实验室由上海市特聘教授张传林领衔建设,团队包括10名核心成员,层次合理且多学科交叉。实验室以多维智能自主系统为核心,聚焦电力智能控制系统、电力智能机器人的相关核心技术,包括智能微网高精度控制与驱动、机器人自主移动与定位导航、传感器数据采集与图像处理、深度强化学习分析与优化决策等方面的科学研究。同时,本实验室也为自动化、测控技术与仪器、智能科学与技术等相关专业本科生认识实习、毕业实习、毕业设计、大学生科创、学科竞赛提供实验场地和实训平台。
实验室现有科研平台包括:
1、交直流混联微电网平台
交直流混联微电网平台配备了交流电网模拟器、交流电子负载、光伏模拟器、风力发电单元、电池模拟器、直流电源、直流电子负载、开源三相四桥臂逆变器、开源直流变换器、线路模拟器、故障模拟装置和实时仿真控制器,可模拟多种能源的直流与交流接入,可用于智能先进控制算法的快速验证,为微电网技术研究与教学实践提供了强有力的支持。本平台为微电网大信号稳定性研究、能量协调互济、电池SOC均衡、电能质量管理、构网型逆变器功率传输与电压支撑等一系列高级应用场景的开发与验证奠定了坚实的基础。
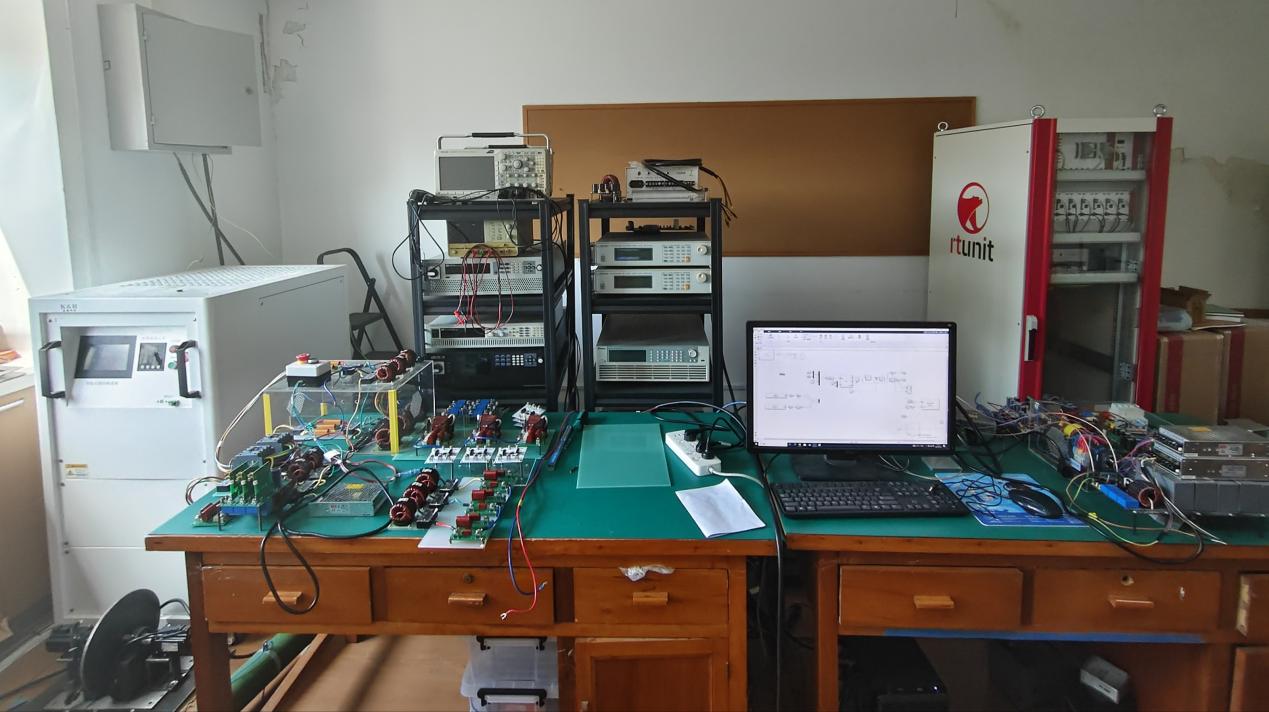
图4 交直流混联微电网平台
2、光伏表面缺陷智能监测平台
光伏表面缺陷监测平台集成深度学习目标检测算法,红外、可见光图像以及激光点云融合算法,基于无人机的3D定位算法和光伏发电预测算法。实现光伏表面缺陷检测与三维定位,提高光伏发电效率。本系统也可检测手持式红外相机采集的光伏表面图像。与传统的光伏巡检手段相比,本光伏表面缺陷监测平台拥有更高的缺陷检测精度以及更迅速的定位,能够更大程度上解放人力,避免不必要的人身安全风险,为光伏巡检提供便捷。
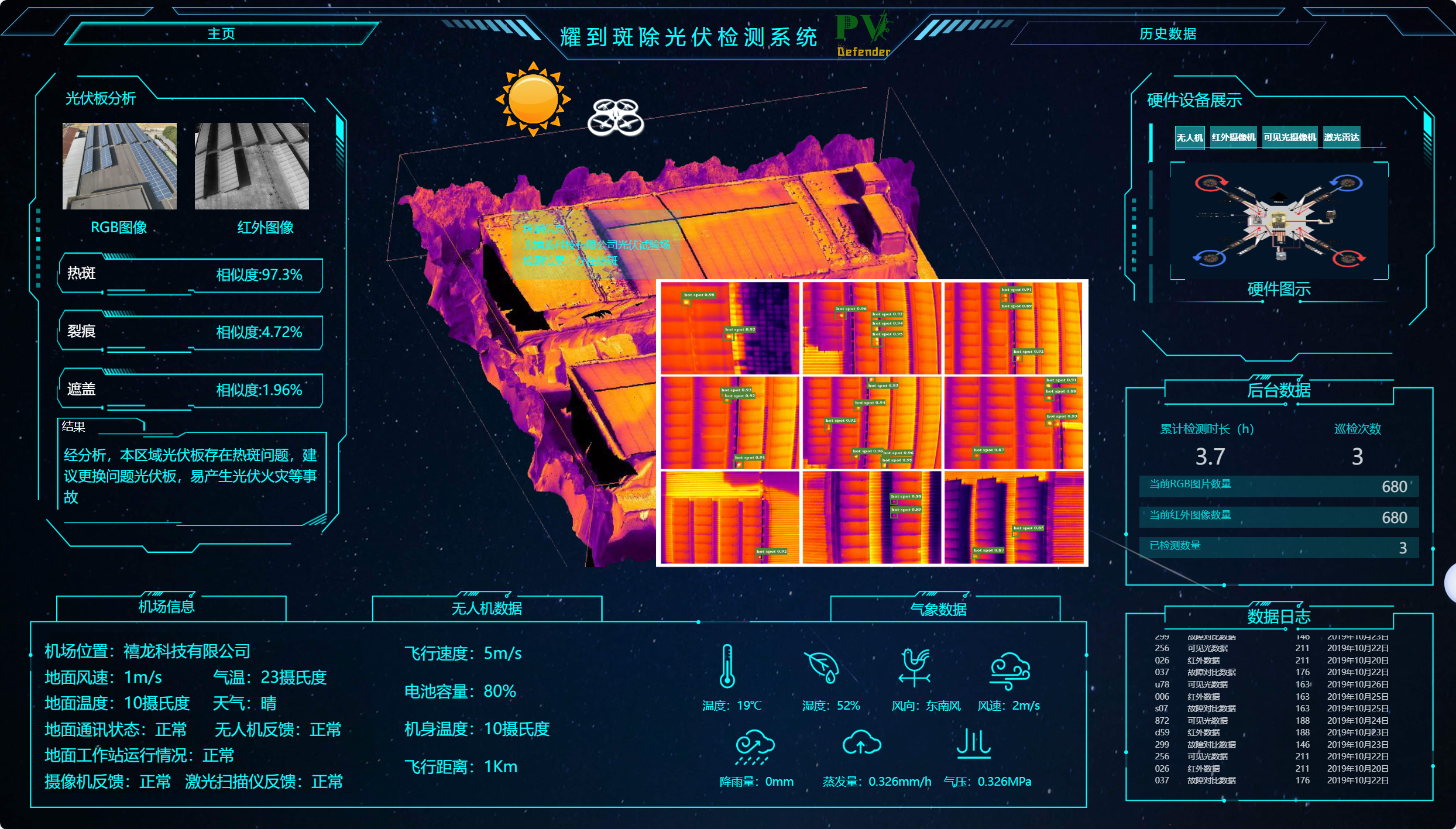
图5 光伏表面缺陷智能监测平台
3、遥操作电力运维机器人平台
电力运维机器人平台实现了一套基于智能化人机交互的变电站带电运维系统,配备了高精度机械臂视觉伺服操作平台、自主导航与定位移动底盘和力反馈遥操作手模块,支持全自主作业和人机协同遥操作两种工作模式。在传统电力操作机器人的基础上,本系统创新性地将遥操作技术引入电力运维领域,实现了远程介入运维的新作业模式。这一技术进展将应用场景从开关室扩展到包括屏柜空开分合、压板投退、倒闸操作等高难度、高风险任务,全面满足了带电运维工作的需求。

图6 遥操作电力运维机器人平台
4、双臂灵巧作业机器人平台
双臂灵巧作业机器人平台配备了先进的UR3与UR3e协作机器人、结构光相机和力反馈两指夹爪,为算法研究、教学实践及技术开发提供了强有力的支持。通过整合各类传感器的数据,该平台能够实现机器人对复杂任务的高效执行。本平台为人机协作策略、精密力控装配策略、双臂协同规划算法、强化学习算法、图像识别算法以及视/力融合算法等一系列高级应用场景的开发与验证奠定了坚实的基础。

图7 双臂灵巧作业机器人平台
5、智能视觉焊接机器人平台
智能视觉焊接机器人平台配备了UR5协作机器人、高精度线激光相机和结构光相机,构建了一套基于视觉融合与焊接智能规划的自主焊接系统。在复杂焊接场景下,本系统能够实现两种不同的工作模式:通过结构光相机进行扫描避障和机器人姿态调整,使用线激光相机进行精细视觉引导焊接。与传统的示教再现焊接技术和人工焊接技术相比,该系统显著提升了焊接质量、生产效率和工人的安全性。
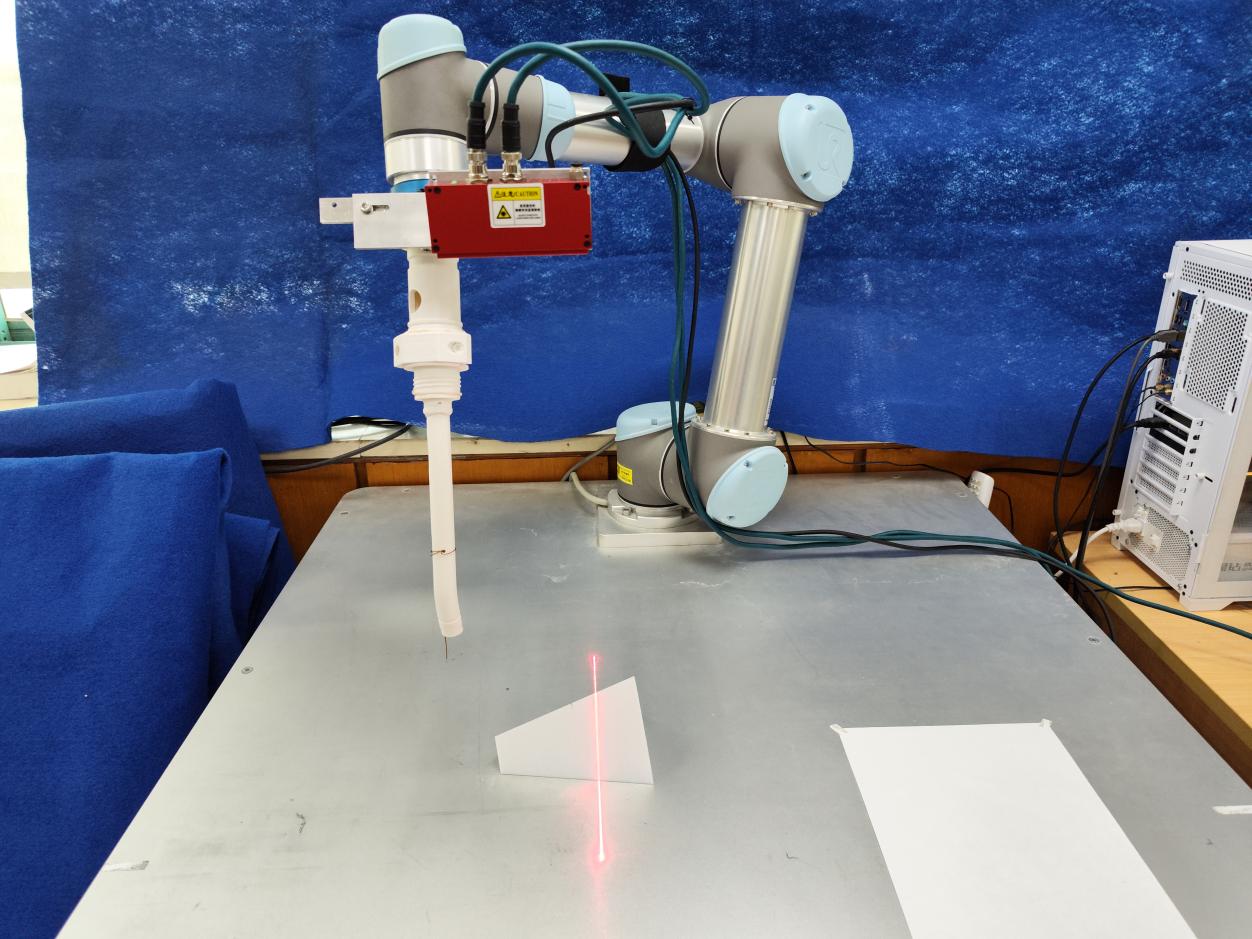
图8 智能视觉焊接机器人平台
6、智能空间三维图像重构与视觉处理研究平台
实验室配备了一系列图像采集设备,包括ZIVID One Plus Medium结构光相机、SICK LMIS511激光扫描仪、大疆Phantom 4 Advanced无人机、FLIR-E6390红外相机和HY-6010高光谱成像仪。这些设备不仅能够进行高精度的三维扫描和室外大场景的点云重建,还能通过红外和高光谱技术提供更为丰富的视觉信息,为后续进一步研究室内外三维图像重构、视觉处理技术提供了全面的数据支持。



(a) ZIVID One Plus Medium (b)SICK LMS511(c) Phantom 4 Advanced



(d)激光扫描硬件连接(e) FLIR-E6390 (f) HY-6010
图9 智能空间三维图像重构与视觉处理研究平台